 |
Fig.1. First version of the Robots developed at the lab
|
|
Fig.1. First version of the Robots developed at the lab
Fig.1 shows the behavior-based control architecture of the system for a serach and rescue scenario.
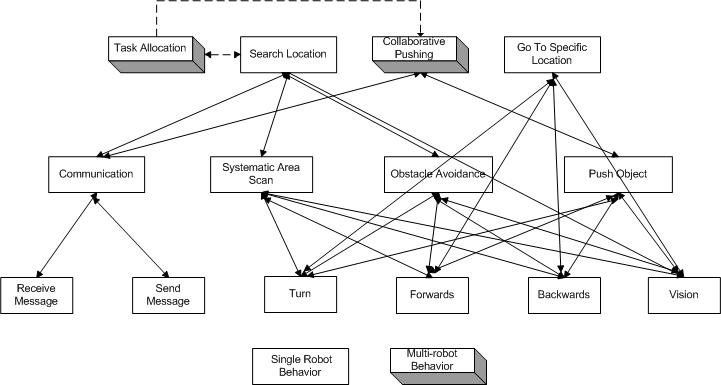 |
Fig. 2. Search and Rescue behavior-based arhitecture
As our testbed we consider a search and rescue scenario reduced to the simple task of collaboratively finding an object and then pushing that object to a given location. We define two classes of behaviors: Single Robot Behaviors and Multi-robot Behaviors. For instance, in the search and rescue scenario, the Task Allocation behavior is a collaborative behavior. Robots need to collaborate in order to find a reasonable task allocation that takes into consideration the current state of each of the robots in a given environment. As figure 2 shows Collaborative Pushing is another collaborative behavior. Again, robots need to coordinate their actions while collaboratively transporting an extended object. Others are Single Robot behaviors, like the atomic behaviors: move forward, turn, etc.
 |
 |
 |
| Single robot box-pushing | Interleaving Roles in Box-Pushing Scenario | Collaborative Navigation Scenario |
Publications